Le référentiel terrestre
Le référentiel terrestre
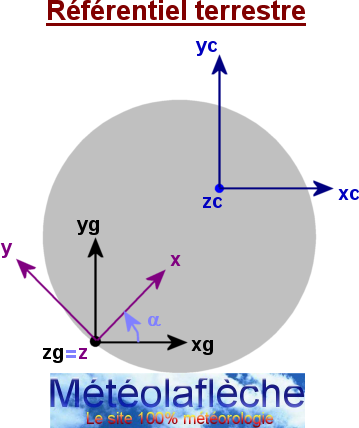
Il est noté RT et est défini par le repère suivant :
(R ; Rxt, Ryt, Rzt)
R : centre d'inertie de la Terre.
Rxt, Ryt, Rzt : axes des pôles géographiques avec Rzt fixe dans le référentiel géocentrique Rg.
Le référentiel terrestre est en rotation d'angle par rapport au référentiel Rg.
 .
.
Le référentiel terrestre est en rotation d'angle par rapport au référentiel Rg.
La relation fondamentale de la dynamique en un point M de masse m dans le référentiel terrestre donne :
SFext (n) = m a(M)/RT
SFext (n) : somme des forces extérieures au système de n points.
m : masse totale du système de n points.
a(M)/RT : vecteur accélération du système de n points dans RT.
D'où
Fg + Fi + F = m a(M)/RT
Fg : force gravitationnelle exercée sur le point matériel M.
Fi : force d'inertie de Coriolis indépendante du point matériel M.
F : résultante des intéractions subies par le point matériel M.
Fg + [ -2mwt LV(M)/RT] + F = m a(M)/RT
wt : vitesse angulaire de la Terre.
V(M)/RT : vecteur vitesse du point M dans RT.

